Thursday, July 29, 2010
Flexure achieved with the telepresence robot finger
Initially, I'd planned to use a Meka Robotics trick of using latex rubber as half of the system to control flexure. As it turned out, however, the quarter inch rubber bands that I had planned on using proved too weak in tension to do the job properly. Instead, I rigged the finger with nylon cord.
As you can see here, it works rather well.
Stiffness in the joints of the finger creates a requirement for a bit more axial force in the control lines that I'd like, so I will be slightly redesigning the joints for a somewhat looser fit.
Tuesday, July 27, 2010
A first finger
I began the telepresence hand design exercise using Andreas Maryanto's design as a starting point.

Andreas was kind enough to scan his design sketches for me which let me puzzle out the intricacies of his design.

Thanks to Google Translate my technical Bahasa Indonesia has improved dramatically. :-)
I took inspiration from several other places as well. Most notable was the Meka Robotics hand.

Their notion of using an elastic strip across the top of the fingers to return the hand to a rest state was very clever. As well, their notion of making the hand a modular unit was also very interesting. From these initial concepts I began to develop my own design.
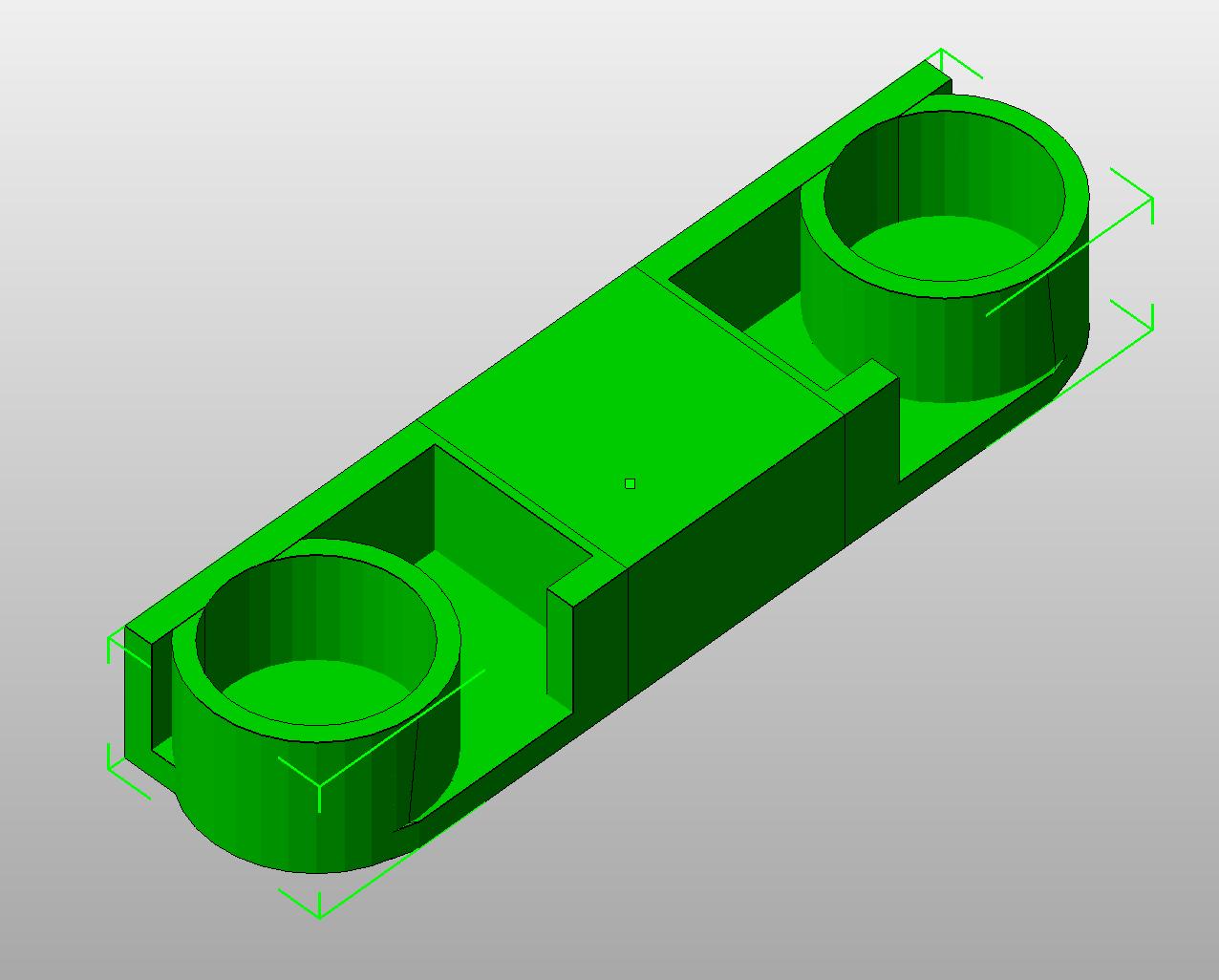
To begin with, I own a personal Reprap-derived 3D printer. A Reprap printer is the functional equivalent of quite an expensive machine shop. It allows for a much freer design than either Andreas, cutting perspex or Meka, milling aluminum and plastic could hope for. After several false starts, I developed a joining approach which was rather easy to work with and print. Here you can see half of a distal phalange.

The middle phalange...

The proximal phalange...
And the base knuckle and hand attachment of the finger...

I printed these parts without infill, as you can see in this printed and assembled distal phalange...

Here are a few pics of an assembled finger at various levels of flexure.



I use the Meka idea of a latex strip to return the finger to rest state except that I decided, for now at least, that rest state is going to be curled rather than extended. The design I've evolved lets the latex strips mostly reside inside the phalanges. The tendon in my design runs across the top of the finger and the servo driving the tendon pulls the finger into a fully extended state.
This approach allows for the latex strips to determine the maximum degree of grip that the hand can deliver. This should let me avoid having to use fingertip pressure sensors to determine the degree of pressure exerted by the hand. That is the theory, anyway.
My next step will be to install the latex strips and tendon. After than I will be designing the hand/servo assembly.
Wednesday, July 21, 2010
Refining and tuning
After refining the finger tip design a bit and tuning the print characteristics I got a much nicer product.

Now to redesign the next phalange.
Thursday, July 8, 2010
Tiny little steps
I finally got the Slice and Dice software for my Rapman 3D printer upgraded so that I can print parts for the telepresence hand project. That done, I ordered a fairly standard servo to play with so that I have something to develop my control firmware with and get used to the little ways of servo/microcontroller interfaces. I chose the Hitech HS-322HD, a coreless servo.

I already have a test board mounting a Microchip 18F4550 which I can hack to run the servo. It uses 5v DC current, which will be handy. I'm going to do a single finger for starts and use a melange of ideas from both Andreas' hand and the Meka robotic hand he showed me a few days ago.
The Meka hand uses a strip of latex rubber, a wide rubber band if you will, secured to the topside of the fingers to return the finger to extended position. That appears to be both simpler and less expensive than the spring system that Andreas used.
Subscribe to:
Posts (Atom)